APLICACIÓN DE TRANSFERENCIA DE MATERIAL

Las
aplicaciones de transferencia de material se definen como operaciones en las
cuales el objetivo primario es mover una pieza de una posición a otra. Se
suelen considerar entre las operaciones más sencillas o directas de realizar
por los robots. Las aplicaciones normalmente necesitan un robot poco
sofisticado, y los requisitos de enclavamiento con otros equipos son
típicamente simples.
CARGA Y DESCARGA DE MAQUINAS
Estas
aplicaciones son de manejos de material en las que el robot se utiliza para
servir a una máquina de producción transfiriendo piezas a/o desde las máquinas.
Existen tres casos que caen dentro de ésta categoría de aplicación:
-Carga/Descarga de Máquinas. El robot
carga una pieza de trabajo en bruto en el proceso y descarga una pieza acabada.
Una operación de mecanizado es un ejemplo de este caso.
-Carga de máquinas. El robot debe de cargar
la pieza de trabajo en bruto a los materiales en las máquinas, pero la pieza se
extrae mediante algún otro medio. En una operación de prensado, el robot se
puede programar para cargar láminas de metal en la prensa, pero las piezas
acabadas se permite que caigan fuera de la prensa por gravedad.
-Descarga
de máquinas. La máquina produce piezas acabadas a partir de materiales en bruto
que se cargan directamente en la máquina sin la ayuda de robots. El robot
descarga la pieza de la máquina. Ejemplos de ésta categoría incluyen
aplicaciones de fundición de troquel y moldeado plástico. La aplicación se
tipifica mejor mediante una célula de trabajo con el robot en el centro que
consta de la máquina de producción, el robot y alguna forma de entrega de
piezas.
OPERACIONES DE PROCESAMIENTO

Además de
las aplicaciones de manejo de piezas, existe una gran clase de aplicaciones en
las cuales el robot realmente efectúa trabajos sobre piezas. Este trabajo casi
siempre necesita que el efector final del robot sea una herramienta en lugar de
una pinza. Por tanto la utilización de una herramienta para efectuar el trabajo
es una característica distinta de este grupo de aplicaciones. El tipo de
herramienta depende de la operación de procesamiento que se realiza.
Soldadura
por puntos.
Como el término lo sugiere, la soldadura por puntos es un
proceso en el que dos piezas de metal se sueldan en puntos localizados al hacer
pasar una gran corriente eléctrica a través de las piezas donde se efectúa la
soldadura.
Soldadura
por arco continua.
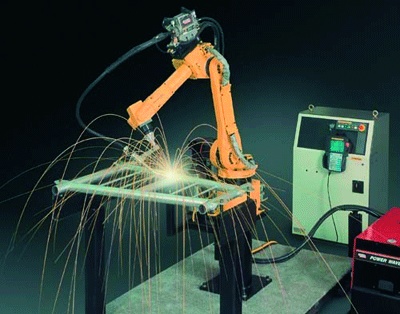
La soldadura por arco es un proceso de soldadura continua en
oposición a la soldadura por punto que podría llamarse un proceso discontinuo.
La soldadura de arco continua se utiliza para obtener uniones largas o grandes
uniones soldadas en las cuales, a menudo, se necesita una cierre hermético
entre las dos piezas de metal que se van a unir. El proceso utiliza un
electrodo en forma de barra o alambre de metal para suministrar la alta
corriente eléctrica de 100 a 300 amperios.
Recubrimiento con spray

La mayoría
de los productos fabricados de materiales metálicos requieren de alguna forma
de acabado de pintura antes de la entrega al cliente. La tecnología para
aplicar estos acabados varía en la complejidad desde métodos manuales simples a
técnicas automáticas altamente sofisticadas. Se dividen los métodos de
recubrimiento industrial en dos categorías:
1.-
Métodos de recubrimiento de flujo e inmersión.
2.- Métodos
de recubrimiento al spray.
Los métodos de recubrimiento mediante flujo de inmersión se
suelen considerar que son métodos de aplicar pintura al producto de baja
tecnología. La inmersión simplemente requiere sumergir la pieza o producto en
un tanque de pintura líquida.
No hay comentarios:
Publicar un comentario